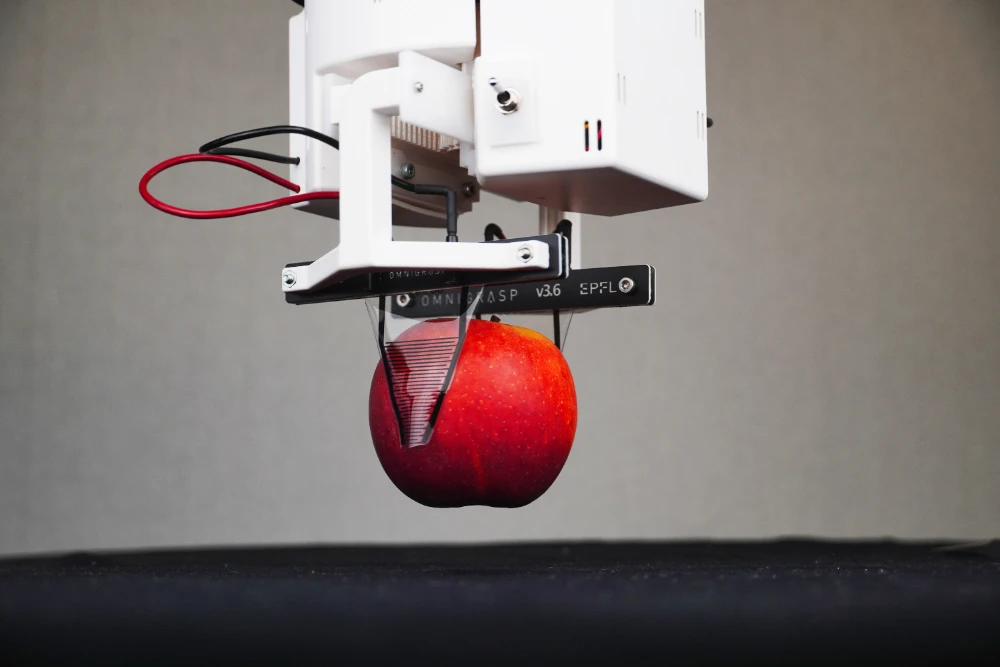
We reinvented the way robots grasp by replacing traditional vacuum suction cups with a soft gripping technology powered by electroadhesion. A fully electric, compact, silent and highly efficient system, designed to provide a delicate and adaptive grip on objects with different shapes, surfaces and levels of fragility.
We are lighter, smarter and radically more efficient.